Digital Inputs (X7/X8)
The drive provides 8 digital inputs I/O Connection. These can be used to initiate pre-programmed functions that are stored in the drive. A list of these pre-programmed functions is included in the WorkBench. Digital Input 8 is not programmable but is fixed to the ENABLE function. If an input is programmed, it must be saved to the drive.

|
Depending on the selected function, the inputs are high or low active. Digital input filter can be set in WorkBench to change sensitivity of the inputs. |
The inputs can be used with switched +24 V (sink type) or switched GND (source type). See diagrams below for typical examples of digital input wiring.
Digital Input Filters
There are four filter options available on all digital inputs whether 24 V or RS485 signal format. The firmware will choose the correct default values. Users have the ability to change the filter:
|
Unfiltered |
Fast |
Default |
Slow |
|
|---|---|---|---|---|
|
Minimum input pulse width |
40 ns |
10.24 µs |
163 µs |
2.62 ms |
|
Typical input to use on |
RS485 inputs, |
Fast optos |
Slow optos |
|
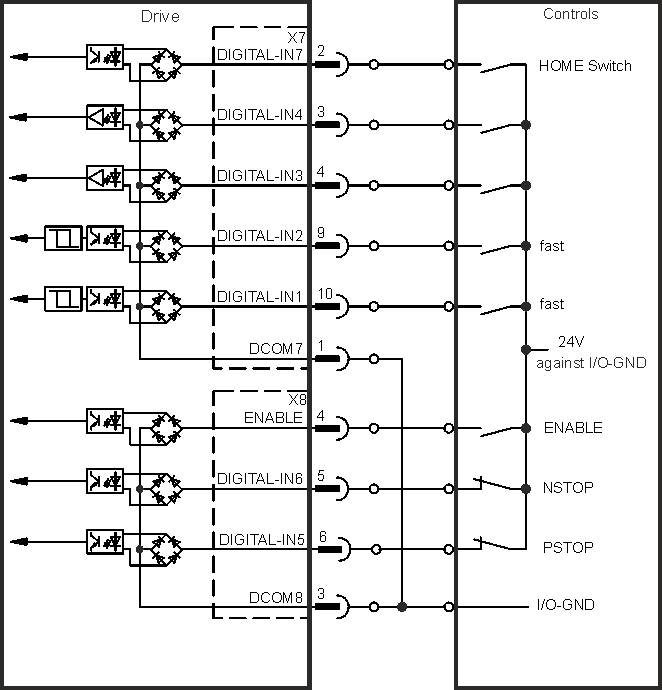
Wiring Diagrams X7/X8
X7/X8 Digital Input Wiring Diagram (Sink type connection, example)
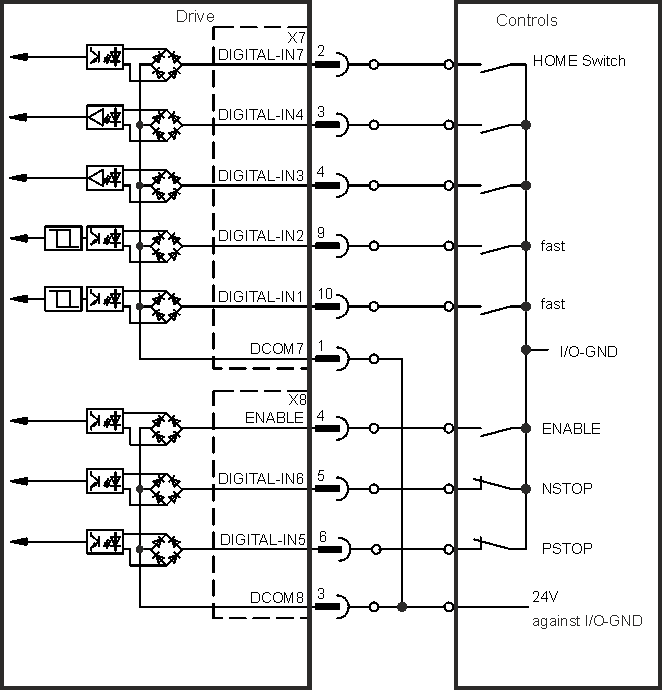
X7/X8 Digital Input Wiring Diagram (Source type connection, example)
Digital Inputs 1 and 2
These inputs (X7/9 and X7/10) are particularly fast and are therefore suitable for position latch functions
Technical characteristics
- Floating, reference common line is DCOM7
- Sink or Source type sensors possible
- High: 3.5 to 30 V/2 to 15 mA , Low: -2 to +2 V/<15 mA
- Update rate: firmware reads hardware input state every 250 µs
- High accuracy latch: motor feedback position or interpolated time is latched or captured within 2 µs of input signal transition (with digital input filter set to 40 ns)
- The AKD capture engine is polled every 62.5 µs (16 kHz) by the firmware
- For KAS applications (example: AKD PDMM), the latch position information is updated in the Ethercat PDO. The typical update time into the KAS project is two Ethercat cycles ( with each cycle being 250 µs, 500 µs, 1000 µs, or 2000 µs)
Digital Inputs 3 to 7
These inputs are programmable with WorkBench, the software to setup your drive. By default, all inputs are not programmed (off).
To choose the function you require and for more information refer to WorkBench.
Technical characteristics
- Floating, reference common line is DCOM7 or DCOM8
- Sink or Source type sensors possible
- High: 3.5 to 30 V/2 to 8 mA , Low: -2 to +2 V/<8 mA
- Update rate: firmware reads hardware input state every 250 µs
- The task update rate for individual Input mode functions can be found here DIN1.MODE TO DIN7.MODE
Digital Input 8 (ENABLE)
Digital Input 8 (terminal X8/4) is set to Enable function.
Technical characteristics
- Floating, reference common line is DCOM8
- Sink or Source type wiring is possible
- High: 3.5 to 30 V/2 to 8 mA , Low: -2 to +2 V/<8 mA
- Update rate: direct connection to hardware (FPGA)
|
|
The Hardware Enable input and the Software Enable signal (via fieldbus or WorkBench) are serial, that means wiring of Hardware Enable is mandatory. |
The output stage of the drive is enabled by applying the ENABLE signal (Terminal X8/4, active high). Enable is only possible if input STO has a 24 V signal . In the disabled state (low signal) the connected motor has no torque.
Enable and link the software via WorkBench, or permanently enable it with help of the software.






